全國服務熱線
0769-85333197全國服務熱線
0769-853331972020-07-09 08:20:00 0
工業機器人作為經典的機電一體化數字設備,應用領域廣泛。單個完整的工業機器人系統的成本中減速器占 35%左右,可以看出影響工業機器人發展的主要因素是減速器。雖然機器人的應用已經在國內得到快速發展,但目前工業機器人的主要供應商仍來自日本和歐洲。所以對其中的核心部件減速器的國產化是降低成本和打破國外壟斷的首要任務。
1、RV 減速器原理
RV(Rotate Vector)減速器是在擺線針輪的基礎上開發的 2 級封閉式低齒差行星傳動機構,是CNC 機床、工業用機器人關節等機電學領域所是用的新型行星傳動機構。由于其擁有運動精度高,傳動比大,扭轉剛度大,傳動效率高等優點,許多學者和研究機構將其作為研究的重點。
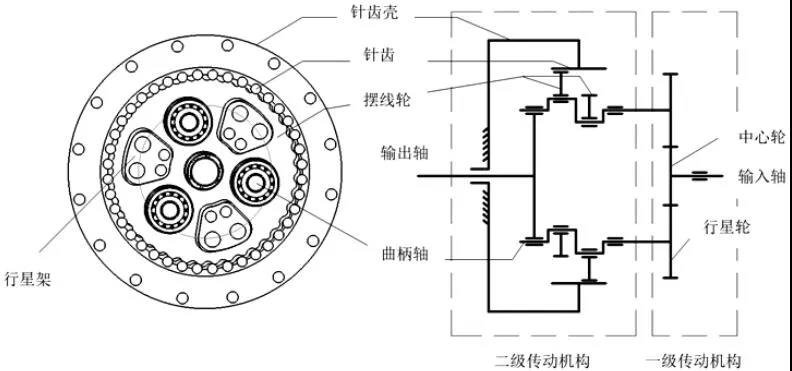
圖1 是 RV 減速器傳動的簡圖,第一級漸開線圓柱齒輪行星傳動機構和第二級擺線針輪行星齒輪減速機構組成,輸入軸和太陽輪形成 RV 減速器的輸入部。擺線針齒輪的輸入由行星齒輪和曲柄軸共同完成。當機構開始傳動時,若太陽輪進行順時針旋轉,行星齒輪進入公轉與逆時針旋轉共存的狀態,此時,擺線輪由曲柄軸驅動以進行偏心運動。這種情況下,擺線輪將受到嚙合針輪的碰撞,其軸線以輪軸為中心公轉,向相反方向自轉。此時,其將通過曲柄軸推動行星架輸出機構順時針旋轉。
2、二級擺線針輪輪傳動機構誤差研究現狀
RV 減速器傳動精度的主要指標是回差和傳動誤差,主要影響因素有:一級漸開線圓柱齒輪行星傳動機構誤差、二級擺線針輪傳動機構誤差、輸出機構誤差。
由于二級擺線針輪傳動機構的誤差不需要通過一系列的傳動傳遞到輸出機構,而與之相反的是,RV減速器一級減速機構的誤差需要,即除以系統的總傳動比。因此,漸開線齒輪在一級齒輪傳動中的相關誤差對 RV 減速器的傳動精度影響不大,而擺線針輪行星機構的傳動精度加權系數大,對傳動誤差影響大。當設計并生產 RV 減速器時,應認真考慮二級擺線針輪傳動機構中的誤差因素。改變二級擺線針輪傳動機構誤差的主要因素有擺線齒廓的修形、曲柄軸偏心距誤差、曲柄軸軸承游隙等。







技術微信