全國服務熱線
0769-85333197全國服務熱線
0769-853331972021-09-17 10:48:12 0
減速機的一般結構
高力矩機器人的腿、腰、肘三個關節、大負載工業機器人和兩個或三個軸作為機器人的RV。與諧波減速機相比,RV減速機的關鍵是加工裝配技術。RV減速器具有較高的疲勞強度、剛度和壽命,與諧波傳動不同,隨著運行時間的增加,其運動精度將顯著降低。
齒輪減速機
RV-E減速機
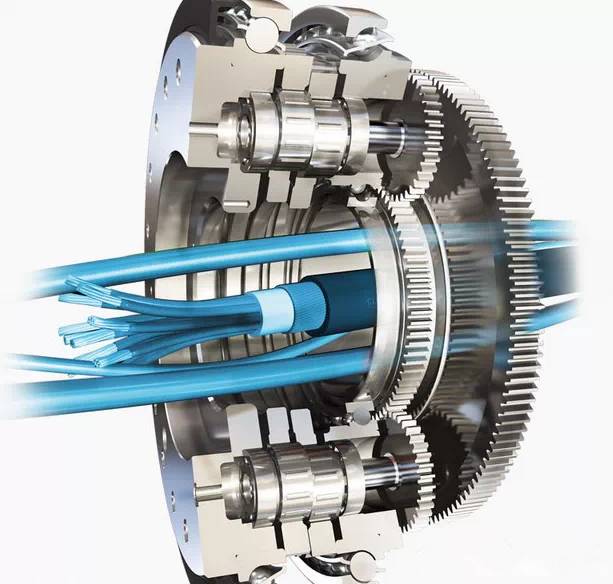
諧波減速機是由諧波加速器和諧波減速機組成的一種諧波傳動裝置。諧波減速機主要包括:剛性、柔性、軸承三個波發生器,四個不可缺少。同時,剛性輪的齒數略大于彈性輪的齒數。本發明具有體積小、重量輕、承載能力大、運動精度高、單相傳動比高等優點。
與諧波減速機相比,齒條傳動是在傳統針擺行星傳動的基礎上發展起來的一種新型傳動方式,它不僅克服了一般針擺傳動的缺點,而且具有體積小、重量輕、傳動比范圍大、使用壽命長、精度穩定、效率高、傳動平穩等優點。齒條減速器由擺線針輪和行星支架組成,廣泛應用于機器人、機床、醫療測試設備、衛星接收系統由于其體積小、沖擊力大、扭矩大、定位精度高、振蕩比和減速比低等優點,使其具有很好的應用前景。擺線針輪減速機殼體采用實心鋼驅動,承載能力強。然而,由于諧波齒輪減速器的彈性能不斷變形傳遞扭矩,這就決定了諧波減速機承受扭矩的能力大,承載效果有限,因此本實用新型采用通常在前端。







技術微信